|
Amber Li
Hi! I am a second year Ph.D. student in the Robotics Institute at Carnegie Mellon University.
I am fortunate to be advised by Professors David Held and Maxim Likhachev.
Previously I received my B.S. and M.Eng. in computer science from MIT, where I was a part of the Learning and Intelligent Systems Group
and worked with Tom Silver, advised by Leslie Kaelbling.
|
|
ResearchI'm broadly interested in creating intelligent embodied agents that can learn and act in dynamic environments over long time horizons. |
|
|
Planning from Point Clouds over Continuous Actions for Multi-object Rearrangement
Kallol Saha*, Amber Li*, Ángela Rodriguez-Izquierdo*, Lifan Yu, Ben Eisner, Maxim Likhachev, David Held Conference on Robot Learning (CoRL) 2025 (Oral presentation, Top 5.7%) project page / arXiv |
|
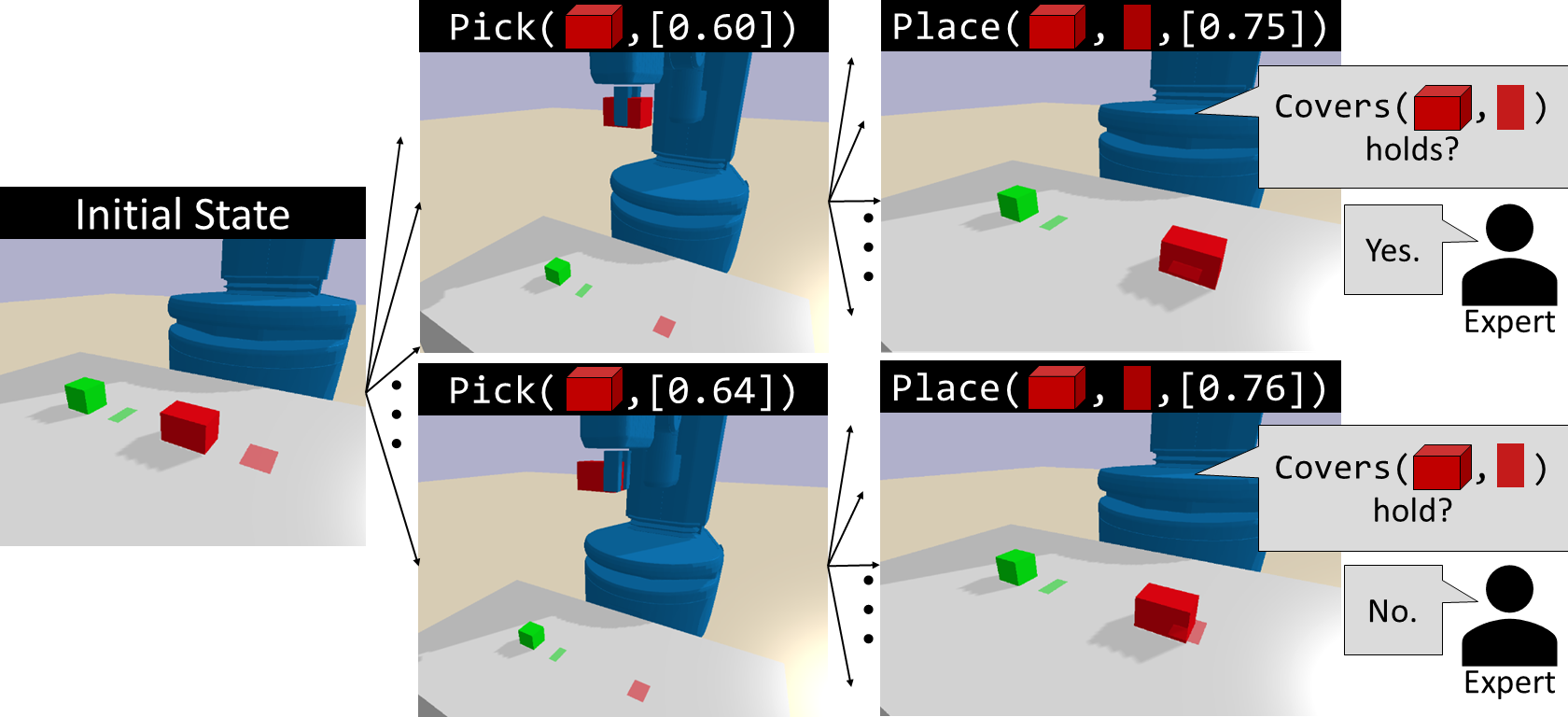
Embodied Active Learning of Relational State Abstractions for Bilevel Planning
Amber Li*, Tom Silver Conference on Lifelong Learning Agents (CoLLAs) 2023 (Oral presentation, Top 12) presentation / arXiv / code |
|
Thanks to Jon Barron for the website template: original source code. |